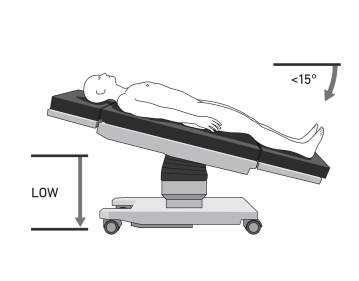
Gelagert wird der Patient in Rückenlagerung in einer leichten Antitrendelenburgposition von ca. 10-15 Grad auf dem großen Vakuumkissen. Der linke Arm wird auf einer Armlagerungsschiene seitlich ausgelagert, um den Operationsbereich freizuhalten und den Zugang für das Operationsteam sowie die Roboterarme zu optimieren. Durch die Verwendung des Vakuumkissens entfallen in der Regel alle weiteren Stützen, was die Vorbereitung beschleunigt.
Merke: Die exakte Positionierung des Patienten ist von entscheidender Bedeutung für den Erfolg der Operation, da sie den optimalen Zugang der Roboterarme zu den Operationsstellen im Bauchraum gewährleistet und das Risiko von Komplikationen minimiert.
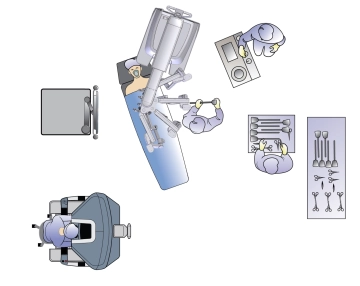
Das Operationsteam besteht in der Regel aus zwei Chirurgen: dem Konsolenchirurgen, der den Roboter von einer Konsole aus steuert, und dem Tischassistenten, der direkt am Operationstisch assistiert. Der Tischassistent sitzt links des Patienten. Der Videoturm, der die Bilder der Roboter-Kamera überträgt steht rechts in Rumpfhöhe. Die Anästhesie befindet sich am Kopfende des Patienten. Die OP-Pflege steht links des Tischassistenten
Vorsicht: Der korrekten Lagerung kommt aufgrund des Andockens des Patienten an den Manipulator des Roboters eine besondere Bedeutung zu. Eine unkorrekte Lagerung oder ein Abrutschen des Patienten während der Operation birgt eine erhebliche Verletzungsgefahr der Bauchdecke durch die Roboterarme oder Instrumente. Daher ist eine sorgfältige Überprüfung der Lagerung vor dem Beginn der Operation unerlässlich.
Bemerkung: Vakuumkissen können im Laufe der Zeit Undichtigkeiten entwickeln. Vor dem sterilen Abdecken des Patienten muss die Dichtigkeit des Vakuumkissens daher nochmals überprüft werden, um einen sicheren und stabilen Halt des Patienten während des gesamten Eingriffs zu gewährleisten. Eine regelmäßige Wartung der Vakuumkissen ist ebenfalls ratsam.